
Objectives of the service
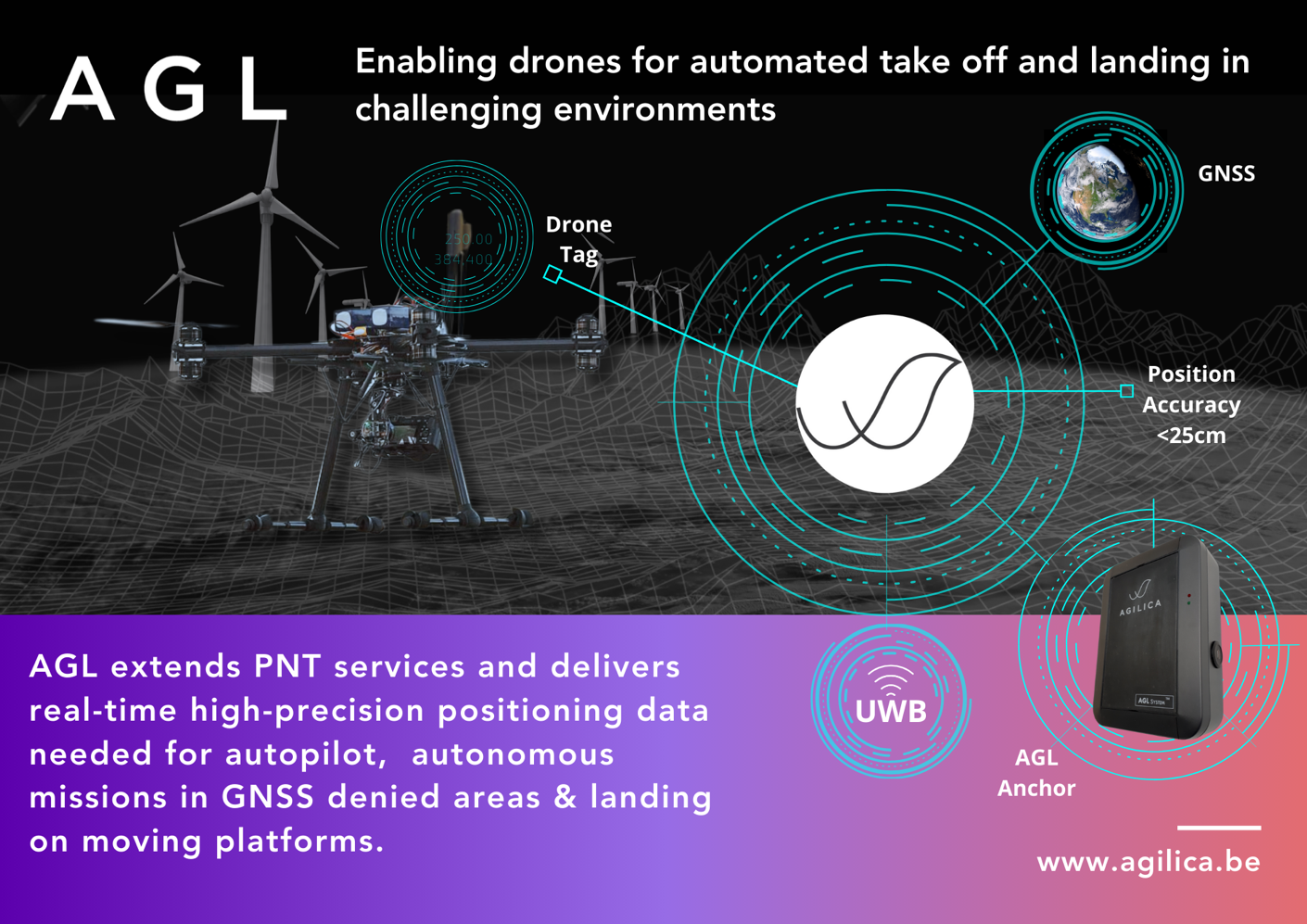
AGL is a real-time local positioning system based on Ultra-Wideband (UWB) Radio Technology, yielding a sub-25 cm accuracy. The AGL positioning system stands as the flagship product for Agilica. The system consists out of a set of fixed anchors with known position, sending UWB navigation messages over the wireless channel to the receiving tags. The tags calculate, based on the pseudo ranges to the anchors, their local position. As the systems is based on one-way ranging, it can be seen as a terrestrial GNSS-like system for positioning and navigation, enabling seamless transition between the GNSS and the AGL system (e.g. in zones were GNSS is not available or a higher precision is needed) and extending the PNT services to GNSS denied areas, e.g. indoor. The objectives of this feasibility study is to increase the precision of the AGL system and to enable seamless transition between the GNSS and the AGL system by integrating GNSS receivers into the AGL anchors.
Users and their needs
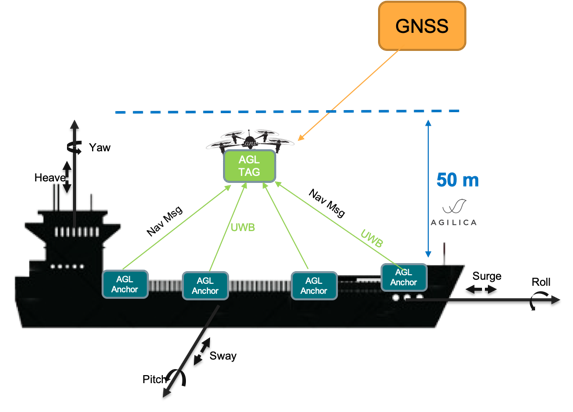
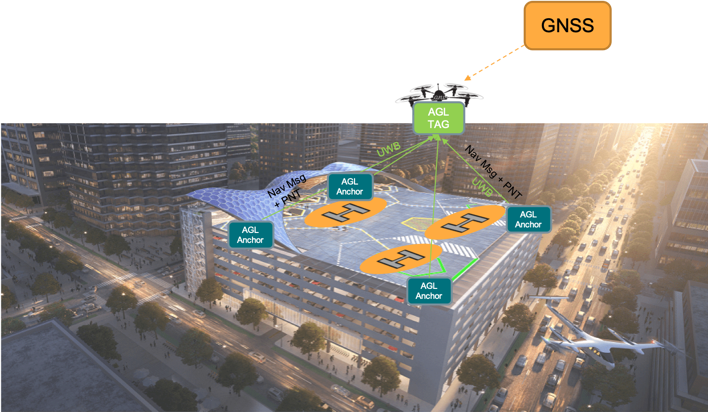
The pain point that is addressed in this study is twofold: On one hand, landing a drone manually on a moving ship is extremely difficult and dangerous, even for the most experienced pilots. On the other hand, drones used for autonomous delivery or logistics need to land on drone ports with a good GNSS coverage. Autonomous landing in a covered space (e.g. a hangar) or close to a building is still a problem due to degraded or no GNSS coverage.
The study provides a robust and accurate UWB based GNSS-like positioning subsystem as an alternative Positioning, Navigation, Timing (APNT) solution, to enable autonomous drone landing for drone services companies that struggle to land manually on a vessel at sea, as well as for drone providers and eVTOL manufacturers operating in challenging GPS-denied indoor or outdoor environments.
Service/ system concept
To provide Alternative PNT services (in global coordinates) to the users and to automate the seamless transition between GNSS and the AGL positioning system, a GNSS receiver is integrated in the AGL anchor modules. In this way, the AGL anchor modules can on one hand make use of the 1PPS signal to improve the synchronization of anchors/tags in the network and on the other hand make use of the global coordinates provided by GNSS to extent the PNT services to e.g. indoor and to enable seamless transition between the two systems.
Inherently the AGL system gives coordinates in a local coordinate system to the mobile tag. To facilitate the seamless transition between GNSS and AGL, the anchor network will broadcast global coordinates of its anchors, whenever available, over the UWB links to the Tag. The tag will calculate a local-to-global translation matrix to translate its local coordinates to global coordinates. For this, it is assumed that at least 2 anchors will have good GNSS reception to distribute a stable clock in the anchor network and to be able to calculate this local-to-global translation matrix.
Space Added Value
The main goal of the feasibility study is to seamlessly extend the PNT services to the indoor environment or to places were GNSS coverage is poor and to increase the precision of our AGL positioning system. A GNSS receiver will be integrated in each AGL anchor. The 1pps signal will be used to enhance the clock synchronisation mechanism in the AGL anchor network. The global coordinates provided by the GNSS receivers will allow the AGL system to automatically and seamlessly extend the global position and navigation services in the local coordinate system. Furthermore, the Galileo High Accuracy Service (HAS) will be used to overcome the difference in accuracy between the two systems.
Current Status
During the start phase of the study, a preliminary design of the new AGL anchors was done, integrating the GNSS receiver and the 1PPS signal, together with a literature study of the most relevant regulations and certifications related to the AGL system.
Initial needs discovery calls with potential end-users and possible early adopters showed significant early interest. Emphasis is on engaging with not only the end user but also the drone OEMs and Integrators, who will have a deep understanding of the technical problems faced by the end users.
The feasibility study was successfully completed, with all project objectives met and major enhancements already integrated into our product line.
Key Achievements and Insights Gained are:
-
Integration of GNSS with HAS: A GNSS receiver supporting the Galileo High Accuracy Service (HAS) was successfully integrated into the AGL anchor design, facilitating a seamless extension of Positioning, Navigation, and Timing (PNT) services. The global coordinates obtained from the GNSS receiver are embedded within the Navigation Messages and transmitted over the UWB channel to the tags, enabling the AGL system to autonomously extend global positioning services into the local coordinate reference frame.
-
Timing Synchronization and Clock Evaluation: Synchronizing the system to the 1 pulse-per-second (1PPS) signal from the GNSS receiver was found to be technically complex and economically unfeasible, leading to the decision to exclude this feature from the system design. To investigate the impact of clock stability on positioning accuracy, an OCXO was incorporated into the anchor design. Results indicated that while the OCXO provided a marginal improvement in the variance of tag positioning during testing, the overall impact on system accuracy was limited. Consequently, from a commercial and practical standpoint, the decision was made to omit the OCXO from the AGL anchor and instead rely on the standard crystal oscillator (XO) embedded in the UWB radio module.
-
Additional Insight from Customer Interaction: Discussions with end users revealed that the integration of a GNSS receiver is not necessary in all deployment scenarios and use-cases. For fixed and permanent installations, global positions of anchors can be pre-measured and hardcoded in the anchors, eliminating the need for onboard GNSS. Nevertheless, the newly developed firmware and Navigation Messages remain essential for system operation. Integration of a GNSS receiver with HAS capability is particularly advantageous in scenarios requiring rapid deployment and setup, as it enables autonomous determination of anchor positions.
-
Sale of the system as a developer kit: Cranfield University ordered a system with the anticipated features in consideration. Their use case involves rapid deploying the system as part of the research and development around urban low altitude environments for UAVs where GPS is partly shaded, so transition from GNSS to AGL is a core element to their project as well as being able to temporarily deploy in different test environments.
The feasibility study provided valuable opportunities for direct engagement with a wide range of customers and end-users. These interactions enhanced our understanding of user needs and requirements. As a result, the updated system design incorporates these insights to the greatest extent possible.
During the study, the number of interactions with potential customers, end-users and channel partners significantly increased, having a positive influence on the number of Strategic Partnerships.
Future work in the technical domain with a direct impact on our product line, will be the expansion of our webserver to enable configuration of global coordinates of anchor position in a static way. This feature will eliminating the need for onboard GNSS receiver in fixed and permanent installations of the AGL system, while still providing seamless transition between GNSS and AGL.
In conclusion, the next steps in commercialization will lay a strong foundation for Agilica to reach its first commercial milestone of securing early system sales. The immediate actions will be to present the results and frame the new feature (in two options) with the customers we have been engaging, using this as a trigger to move the sales conversation forward. In parallel updating the marketing and sales messaging and materials to bring focus and finally going public with some PR and social media showcases to create the interest in a wider audience. The support activities will also be key including continuing and building on the close relationships we have fostered – having these critical first customers close to us has been valuable so far and will no doubt provide future value and referrals if we can magnify customer success. By leveraging pilot projects, developer kit sales, and a clearly defined customer pipeline, the strategy ensures an efficient path to market, reinforced by a robust channel partner program and targeted marketing campaigns. The close relationships fostered by this feasibility study and ongoing through planned pilot engagements and customer success initiatives not only support product adoption and iterative improvement but also position Agilica for scalable growth through strategic partnerships and a compelling differentiation from other positioning technologies. With early validation from key stakeholders, like Intersoft Electronics, Cranfield University and participants at the UK National Drone Hub SME Charter Event, and further exposure planned at DroneX 2025, Agilica is well-positioned to continue building traction for successful market entry, build trust with early adopters, and establish a sustainable presence in the drone positioning and GNSS-alternative navigation market.