
Objectives of the service
Autonomous deConfliction of Drone-Congested areas (AC-DC) enables drones to deconflict at much more precise levels by utilising our software-to-software approach integrating with the drone's SatNav capabilities, adding no extra cost or energy-consuming equipment to be installed on the drone. For the successful deconfliction of drones testing and applying various types and techniques of GNSS combinations, including the application of Galileo HAS, in operational scenarios will be key, as they contribute to improving the overall performance and reliability of our dynamic high-accuracy positioning service and, reduce the separation distancing in and around vertiports, airports and congested areas. The AC-DC project focuses on the design of a high-precision/high-accuracy module to support the effective and efficient deconfliction of drones in select areas prone to aerial congestion. SatNav resources are utilised, such as GPS, Galileo, Galileo HAS, EGNOS, and RTK technology in various combinations to obtain sub-metre precision and accuracy and test how to manage drones operating with varying degrees of degradation of accuracy. This enables Skypuzzler to handle deconfliction in small and congested areas where a higher certainty of the drone's position is needed.
Users and their needs
This project targets Unmanned Aircraft System Traffic Management (UTM) providers and drone operators within the EU as key users and customers of our integrated Digital Air Traffic Control (iDATC) solution enhanced by a GNSS-supported module for high-accuracy services.
These two customers/users face the challenge of ensuring high-accuracy flight safety and flight efficiency.
Key user needs include:
-
Capabilities for increasing operations as the proliferation of drone services scales up, without risking flight safety
-
Ensure continuous and efficient drone operations in congested or dense airspaces, with minimal risk of drone collision or conflicts
-
Ability to operate in an airspace with actors (drone operators) who are using various GNSS resources with differing degrees of degradation of accuracy affecting the separation minima of drones.
Challenges faced in this project include external factors such as weather conditions, which can disrupt drone flight execution (testing) and GNSS signal reception (particularly Galileo-HAS), potentially impacting the service requirements needed to meet user needs. The current lack of COTS (Commercial off the shelf) Galileo-HAS receivers means the signal must first be converted into usable data before being applied to drone flights.
Service/ system concept
The AC-DC (Autonomous deConfliction of Drone-Congested areas) Module for integrated Digital Air Traffic Control (iDATC) affords Unmanned Aircraft Systems Traffic Management (UTM) Providers with enhanced means for managing large groups of drones operating in limited aerial spaces such as in and around vertiports, airports, and other logistical-oriented transport nodes.
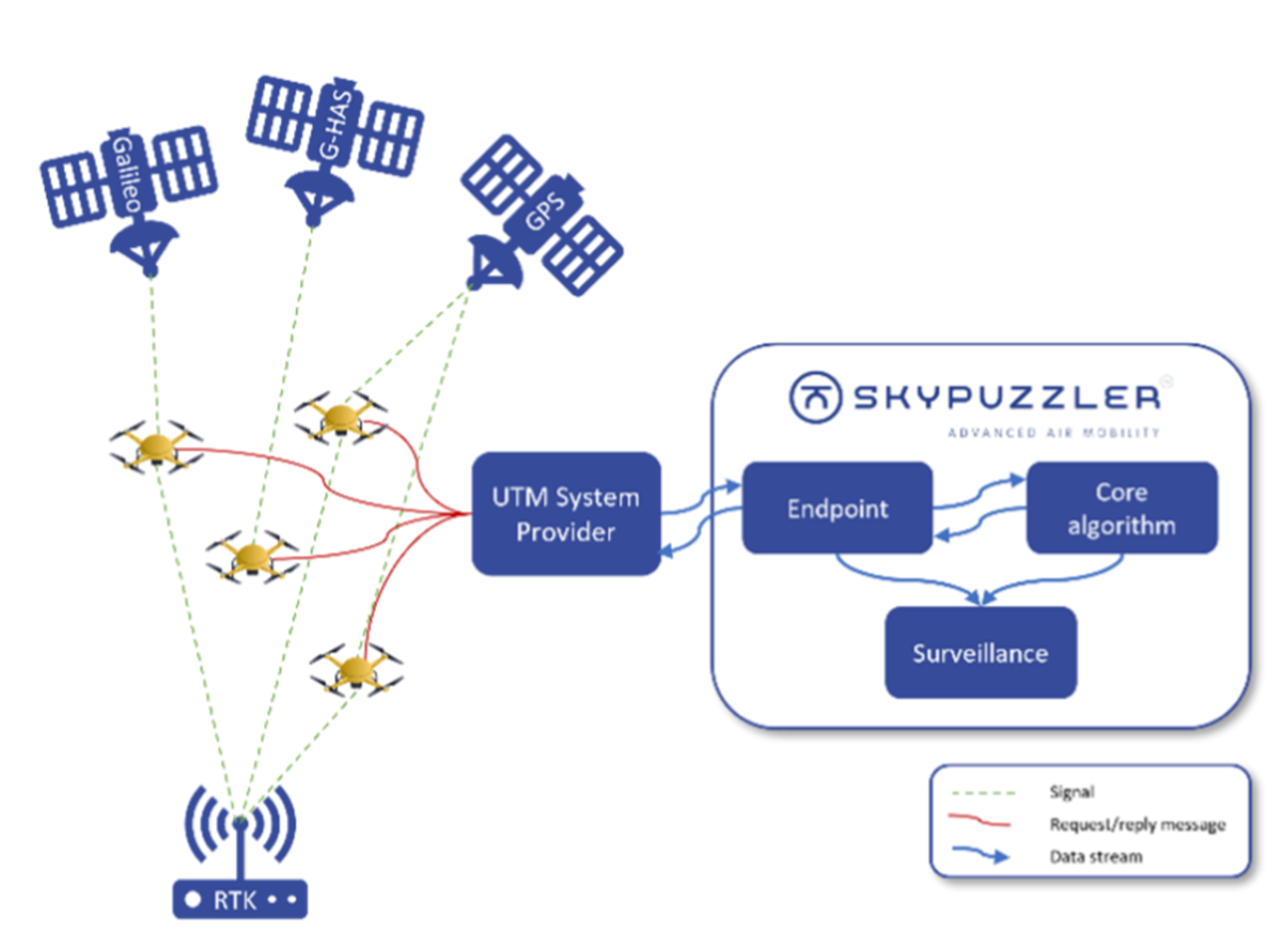
The AC-DC module enables Air Traffic Control systems to process navigational data coming in from various GNSS sources such as GPS, Galileo, EGNOS, Beidou, and the new Galileo High Accuracy Service (HAS), etc. All of which operate with varying degrees of degradation of navigational accuracy that they offer to their respective users, in our case Drone Operators and UTM Providers.
Using the AC-DC module improves flight safety in areas where risks of collision or conflicts are higher e.g., crowded airspaces. By affording a flight-accuracy module such as AC-DC. Drones will be able to recognise the GNSS influence each is flying under and adapt their separation minima accordingly and thereby maintaining flight safety and operational efficiency. Moreover, the AC-DC module offers Galileo-HAS support which promises unprecedented accuracy horizontally and vertically.
Space Added Value
Space assets such as SatNav services provided by GPS, Galileo, EGNOS, and especially Galileo HAS, are the main specific space assets envisaged to support our project, as they can provide us with the needed levels of navigational precision for the successful deconfliction of drones operating in an area with reduced separation distance.
The project focuses on implementing and testing different levels of navigational precision, with GPS, Galileo, EGNOS, and Galileo HAS, into Skypuzzler’s product to facilitate handling drones differently depending on their levels of precision. Current SatNav (i.e., GPS, Galileo, EGNOS) capabilities support navigational and positional accuracy as low as to ~3 metres, while next-generation services such as Galileo HAS will allow for much more precise positioning and navigation down to centimetre-level accuracy. By working with both current SatNav technologies, and the Galileo HAS technology, Skypuzzler will be able to handle deconfliction in small and/or congested areas, where a higher level of certainty of a drone's position is needed and where various levels of position and navigational accuracy degradation may occur.
Current Status
The project was launched in start of June 2024 and have since then made strong progress. We have identified user needs through interactions with our strategic partners and defined the technical requirements for our solution. And initial feasibility assessment has been completed, during which we explored the theoretical possibilities for performing autonomous tactical deconfliction of drones operating with varying degrees of degradation of accuracy, to which we have finalised a technical concept with the overall system architecture being ready for development and subsequent implementation into our core system - integrated Digital Air Traffic Control software. Current activities include ongoing user research to further strengthen and enhance our user requirements, and planning for implementation of AC-DC core components and setting up test protocols and trials.
Prime Contractor(s)
