

Objectives of the service
The main objective has been to validate the service of using a mobile robot solution for collecting data on sidewalks. The idea is to perform two distinct services simultaneously. 1) Creating or refining the precision of satellite-based GIS maps of sidewalks using data collected via adequate accelerometers and cameras, and 2) Collecting data on the quality of the sidewalks for assessing the need for urgent maintenance of sidewalks using accelerometers, coupled with an AI camera for additional data and visual confirmation.
The needed precision of satellite data is not available at present. The maps are based on satellite pictures and manually corrected to combat objects blocking the view, like roof overhang, building parts, and trees. Maps are updated every 5 years and have an uncertainty of ±15 cm at best.
Once data has been collected, we must convert it to a standard format for GIS like GeoJSON on a GIS layer so that clients can use it in their GIS systems.
Users and their needs
Denmark is one of the countries with the most complete and widespread GIS data. Despite that, the needed precision of GIS data is not available at present. We focused our attention on 3 customer groups that would benefit from continuously updated GIS data.
-
Municipalities who are dependent on precise GIS data, e.g., for creating tenders for service providers for maintenance of sidewalks. The case customer for this part of the business is Aarhus Municipality (DK). More precise data will enable municipalities to create more precise tenders for service tasks related to sidewalks. This could be removing weeds, sweeping, or thawing ice on sidewalks.
-
Municipalities who want insight into the current state of their sidewalks. The case customer for this part of the business is GovTech Midtjylland (DK), a working community between 16 municipalities in the Central Region of Denmark, including Aarhus Municipality. Proving our solution in Aarhus will provide entry to the additional 15 municipalities.
-
Privately held company NaviBlind (DK) provides a GNSS-based navigation system for blind and visually impaired people. Their motivation lies in perfecting the solution we offer, as our solution can help them make more precise routes for visually impaired people faster and cheaper.
Service/ system concept
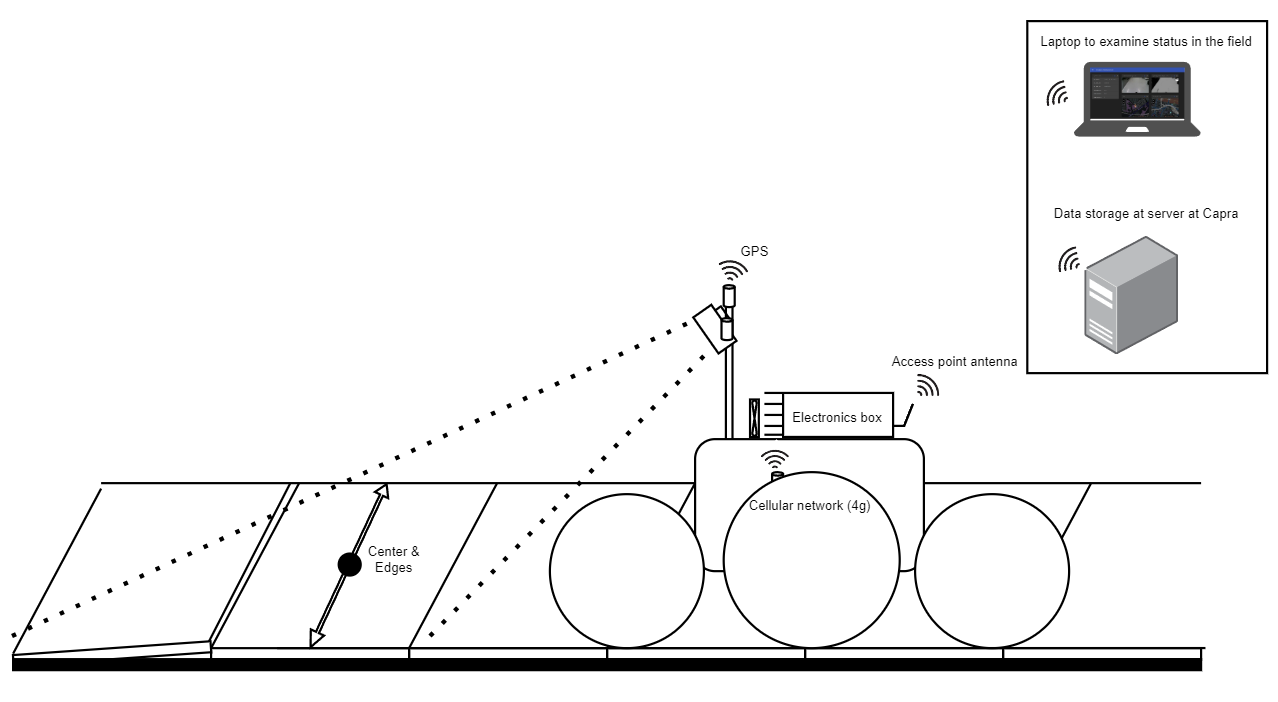
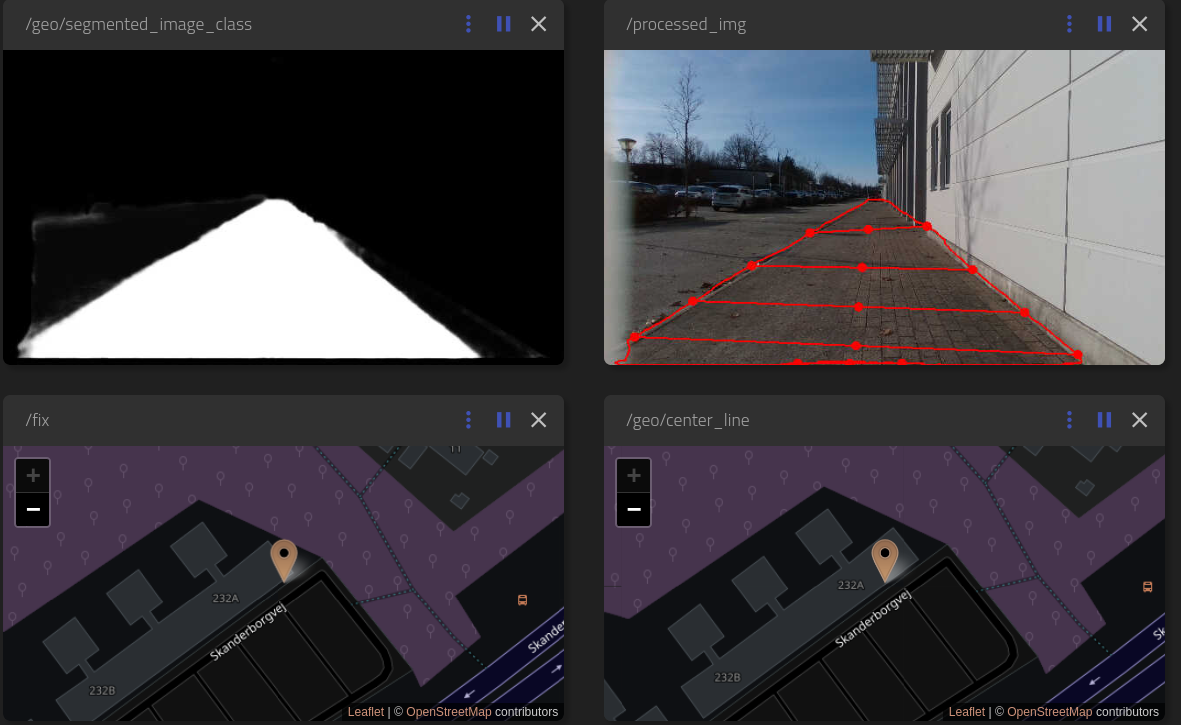
We are target customers who already have access to and utilize GIS maps. Our solutions offers to update these maps based on our own data collection. We are responsible for converting the collected data into a standard vector format like GeoJSON, which the end-users can use to create/verify their own GIS maps. While we are measuring the sidewalks, we can use the accelerometers in the robot’s wheels, to map unevenness in the substrate, thereby identifying where the infrastructure needs maintenance. To minimize the amount of false positives from the IMUs, the system is coupled with an visual AI system for visual confirmation. Identified areas in need of maintenance are logged and related to their GNSS position. Our collected data can be extracted as GeoJSON files from the database which can be viewed in a geographic information system such as QGis.
Space Added Value
We use GNSS with RTK for directing our robot. We are part of the TAPAS network in Aarhus that allows us to position within 1 cm³ of accuracy and ± 1 degree of heading under open sky with the use of TAPAS RTK, uBlox ZED-F9P receiver, and Active Quad Helix Antennas. We are using GIS data as a base knowledge for where to drive. Due to the lack of precise GIS maps, we need to drive slowly and rely on other navigation support systems like V-SLAM (Visual – Simultaneous Location and Mapping) to be able to drive on sidewalks.
Current Status
Prime Contractor(s)
