
Objectives of the service

Heibjerg is developing an autonomous robotic solution to address the labour-intensive task of weed control in gravel and stone-paved areas, commonly found in cemeteries, housing associations, sports arenas, and parks. The current challenge for users is the high cost and time-consuming nature of manual weeding, with sites requiring 10-12 treatments per year, amounting to approximately €10,000 per hectare annually. Labor costs are the primary driver of these expenses, even when using specialized equipment.
The solution provided by Heibjerg involves a small robot that combines hot water and mechanical methods to perform the weeding autonomously. This innovation aims to reduce labour dependency and significantly lower operational costs. By integrating Global Navigation Satellite System (GNSS) technology with additional sensors, the robot can navigate complex sites and carry out precise treatments without human intervention.
The objective of the project is to automate and optimize the weeding process, reducing the cost, labour, and environmental impact associated with traditional methods. The project will demonstrate the effectiveness of this technology, especially in sites with intricate layouts such as cemeteries, and will showcase its potential for broader applications.
Users and their needs
The Heibjerg Robotic Weeding solution is designed primarily for garden professionals, groundskeepers, and facility managers who oversee weed control on larger sites such as cemeteries, parks, and housing associations. These users face a growing set of challenges, including stricter herbicide regulations in many EU countries, the extended weed season due to climate change, and increased fire hazards from traditional weed burners during dry periods.
Users are looking for:
-
Reduction in labour dependency: The need for automated solutions to minimize the reliance on manual labour.
-
Reduction of CO2 footprint: A more sustainable approach to weed control, with reduced environmental impact.
-
Elimination of fire hazards: A safer alternative to traditional methods, especially in dry conditions.
-
Increased flexibility: The ability to perform weed treatment at any time without disrupting the site schedule.
This project is based in Denmark. Initially Heibjerg is targeting local cemeteries and housing associations. However, there is a strong interest in spreading to other sites and regions as well.
Service/ system concept

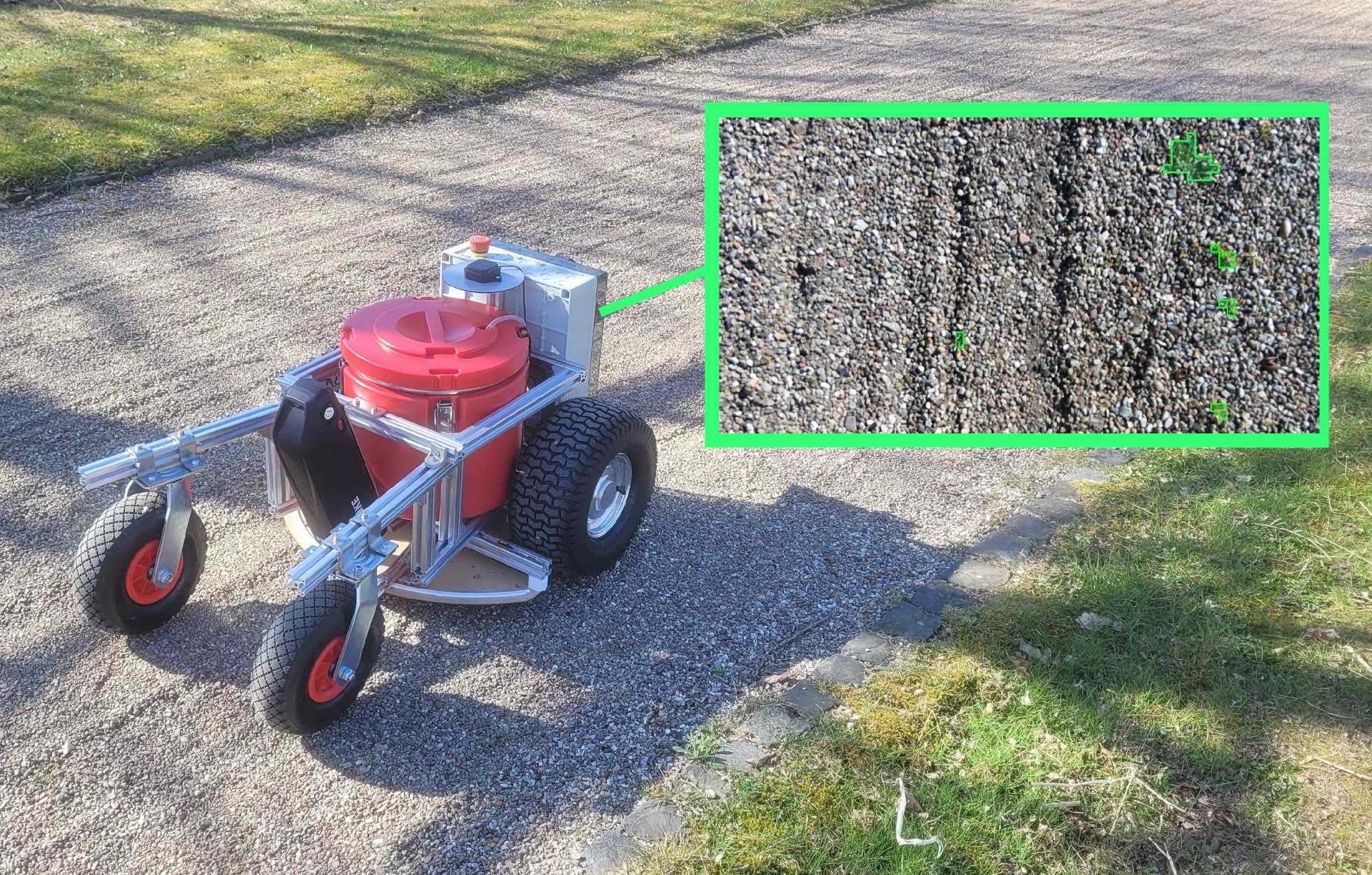
The Heibjerg Robotic Weeding solution provides groundsmen with an efficient, automated tool for targeted weed control. Users define the area to be treated, either on-site or via an app, and the robot systematically navigates and covers the designated zones. Using advanced vision technology, the robot identifies individual weeds. It applies targeted spot treatments with boiling water, significantly reducing energy consumption by up to 65% compared to conventional methods that indiscriminately treat the entire surface.
The system consists of two main components: a mobile robot and a service station. After completing its tasks, the robot autonomously returns to the station to refill water, recharge, and stand by until the next scheduled operation. Users can easily configure treatment schedules, adjust targeted areas, and monitor real-time progress via an app, which also provides notifications about any operational issues.
At a high level, the system architecture integrates GNSS-based navigation, onboard vision-based weed detection, adaptive treatment control, and wireless communication with the app interface, ensuring both autonomy and full user oversight.
Space Added Value
The core navigation system is fundamentally based on GNSS-derived positioning. Heibjerg is currently investigating how emerging technologies—specifically Galileo High Accuracy Service (HAS) and multi-constellation RTK-enabled receivers—can provide low-cost, high-precision navigation solutions for outdoor mobile robots. Operating within an urban environment presents significant challenges, as signal degradation caused by obstructions such as trees, overhead structures, and multipath effects due to reflected signals can lead to unreliable satellite reception. To address these limitations, the project is also exploring the integration of complementary sensor technologies to enhance navigation reliability under suboptimal GNSS conditions, while maintaining a strict focus on cost-effectiveness.
To overcome the limitations of GNSS-only navigation in urban environments, the project explores the use of sensor fusion techniques. By integrating additional sensors such as inertial measurement units (IMUs), wheel encoders, and vision-based systems, the goal is to enhance the robustness and reliability of the navigation solution in a computationally efficient manner.
Current Status
The Heibjerg Autonomous Weeding Robot Kickstart project concluded in the summer of 2025. Throughout the project, Heibjerg successfully developed and tested a prototype robot capable of autonomously navigating complex outdoor environments such as cemeteries and housing associations.
Field tests were carried out in collaboration with Sdr. Nærå Cemetery and Civica Housing Association. These trials demonstrated the robot’s ability to follow GNSS-guided paths with high precision, detect weeds using onboard vision systems, and perform eco-friendly thermal weed treatment using hot water.
the project, the solution was refined through continuous feedback from end users. Key developments included improvements to navigation stability, weed detection accuracy, and user interface design. A mockup app interface was tested with users to explore mapping, geofencing, and fleet management features.
The project has provided valuable insight into the technical feasibility and user requirements for deploying autonomous weeding robots in real-world settings. Heibjerg is continuing the development towards commercialisation. For further Interest in the product or solution, do not hesitate to contact Heibjerg.