
Objectives of the service
Image credit: ©pixone3d - stock.adobe.com
The main objective of MSaaS is to identify, define and assess economically and technically sustainable UMS based services. These services are validated with regard to their technical and commercial feasibility. In addition to these, stakeholder requirements are agreed upon, as well as business plans for service implementation are developed. Furthermore, MSaaS shows business opportunities in the field of ship technology, shipyards, shipping companies, providers of intelligence and reconnaissance services and other industry stakeholders for the implementation of services in the target market. One outcome of the project is an outline proposal for a possible successor demonstrator project.
Users and their needs
Four larger clusters of relevant stakeholders and user communities exist: Service providers, Public administrations, Shipping companies and Navies. In consolidation, i.e. the following needs exist in developing unmanned maritime services:
- MSaaS must relieve humans from difficult or dangerous tasks
- MSaaS must be compatible with different sensor systems.
- MSaaS must be able to detect non-AIS traffic.
- MSaaS must be easily and intuitively operational with few in-depth knowledge of the system.
- MSaaS must allow interception by humans in difficult / unclear situations. Therefore, external control unit ashore or on board of a mother ship is desired or a fail-safe mode is integrated.
- MSaaS must operate in different sea areas. Especially smaller UMS are intended to keep coastal areas and ports under surveillance.
- MSaaS must be failsafe (e.g. by redundancy) and reliable.
- MSaaS must be able to patrol and follow on search patterns.
- MSaaS must give the opportunity to offer different autonomy levels (e.g. offering decision support as a first level with optional autonomy packages).
- MSaaS must have low maintenance level, easy maintainability by own staff/personnel and reduced downtimes.
- MSaaS must provide collision avoidance.
Service/ system concept
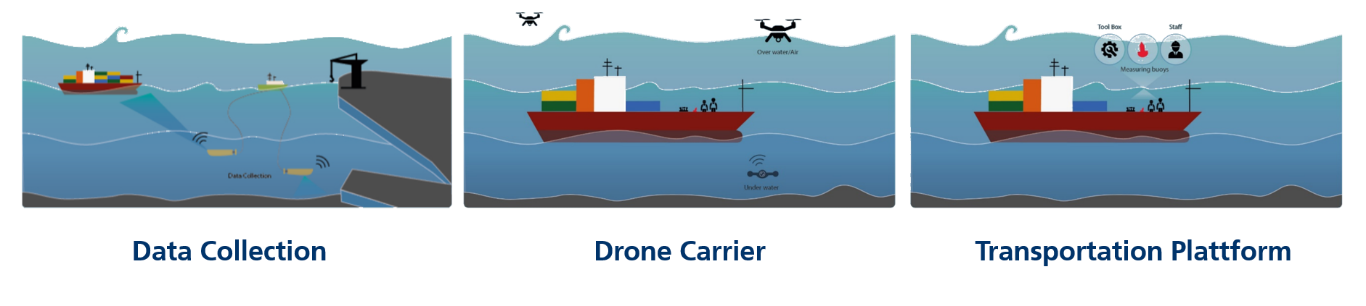
Image credit: Fraunhofer Center for Maritime Logistics and Services CML
MSaaS has developed a service concept, which separates into three different sub-services. Different services will be made available to different stakeholders at varying levels of autonomy to suit their individual automation needs.
Data collection is understood as surveillance task in general, gathering information by sensors. Environmental data collection, such as water depth, remote weather conditions or underwater condition of constructions are a main driver in contemporary and short- to medium-term consideration. The data collection service aims to enhance the situational awareness on scene (remote) and helps to reduce immediate danger to humans, ship and equipment.
An UMS should work as a platform for air-, surface and underwater-drones. In this case the UMS carries a drone to the area of operation, for example close to offshore structures, survey areas or mined areas and stays on scene during the operational phase of the carried drone. This can reduce the delivering time of the drone and extend the on task time for the drone.
The third service scenario aims at a use case, where the UMS takes over transportation tasks. The UMS is the tendering link between storage/shore and operational area/infrastructure, like from port to offshore areas. The transportation service aims to enhance operational safety and reliability of offshore structures and maintenance tasks.
In order to be able to represent all use cases different mission modules are developed to fit one platform module and on communications module. Over a control station (ashore or on mother ship) the unmanned surface vehicle will be directed, lowered to the sea level and heaved back on board.
Space Added Value
To enable a semi-autonomous mode of operation, high-precision GNSS positioning of the UMS is vital to successfully carry out the required manoeuvres during patrol duty. Depending on the mission area, different communication infrastructures are available that must be accounted for. This comprises land-based mobile communications such as 5G in the future on the one hand as well as satellite-based communications such as Iridium and VSAT on the other.
Current Status
After several interviews with stakeholders of the maritime community user requirements were established and three different use cases developed. The services including the system architecture is finally specified and a viability analysis is conducted. The final results of the project have been presented and the study is successfully completed.
