
Objectives of the service


MUPO is a modular, autonomously navigating robot designed for livestock farms, supporting manure removal indoors and outdoors.
Using high-precision RTK GNSS or Galileo HAS for outdoor navigation and wireless positioning inside stables, MUPO operates everywhere reliably in harsh environments with dirt, dust, and manure.
Unlike conventional manure removal, MUPO requires no permanent installations such as floor-integrated magnets or ropes. Its plug-and-play design enables fast integration in any stable, without costly or time-consuming structural modifications.
With free-flow navigation in the entire stable area and Satellite Communication for reliable internet connectivity (even in rural or alpine regions) MUPO is compatible with all cattle farms.
Users and their needs
MUPO enables automated cleaning services in stables. Precise manure removal can enhance hygiene, decrease operating costs and minimise illnesses. MUPO allows farmers to avoid laborious and potentially harmful tasks such as manual manure removal. This improves livestock welfare by enhancing hygiene measures and preventing illnesses.
Service/ system concept
This robot is used in agriculture and can autonomously remove manure in stables.
MUPO is the solution to simplify the autonomous cleaning also as a retrofit solution also for existing stables.
MUPO provides precise indoor/outdoor navigation that enables a robot to drive autonomously everywhere in stables while objects and livestock can be detected and avoided without the need of intervention by the farmer.
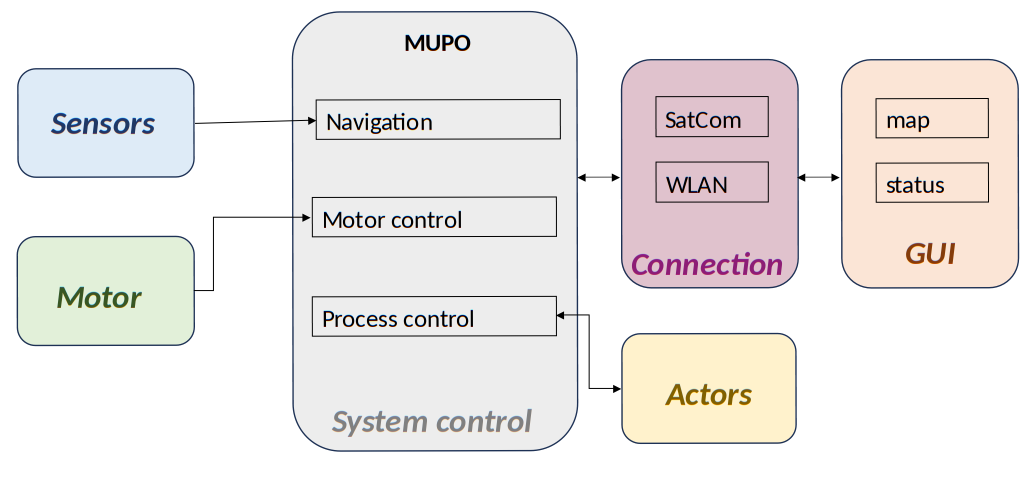
Various sensors provide the input for the navigation, the System Control initiates the control of the motors and various process controls, such as battery charging or autonomous cleaning. This is used to control various actuators (i.e. for manure discharge). All important information of the stable or the livestock can be output via a GUI and an app.
Space Added Value
The primary method of positioning is Satellite Navigation with RTK (Real-Time Kinematic) or Galileo HAS (High Accuracy Service) as a possible alternative. This is complemented by a wireless positioning method, particularly used indoors. Satellite Communication will be used to enhance redundancy and independence, which is especially important in rural or remote (alpine) areas.
Current Status
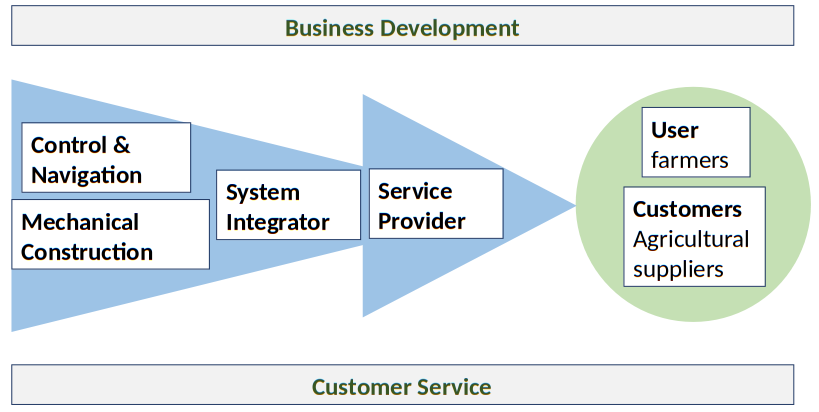
This value chain diagram illustrates the process from technology development to end users and customers in agriculture.
It starts with the development of the Control & Navigation on the one hand and the Mechanical Construction on the other, which are brought together by the System Integrator and then transferred to the Service provider.
The final product then reaches both Enduser (farmers) and Customers (such as agricultural suppliers).
Successful Demonstration Project start took place in 11/2025 with a Kickoff meeting.
This Demonstration Project is based on the results of an previous Kickstart project MUPO with the following link: https://business.esa.int/projects/mupo
Prime Contractor(s)

