

Objectives of the service
The proposed solution is based on a Farm Management System Control unit and a Unmanned Ground Vehicle Control Unit integrated with space assets and a set of enabling technologies (e.g., sensors, 3D vision systems). The solution is able to autonomously carry out the harvesting of fruits in outdoor environments and acquire a meaningful set of geo-referenced data related to the status of the crop during the production phase and to the characteristics of the collected goods (e.g., weight, geometry, colour) during harvesting activities. The service that we intend to offer is therefore threefold:
-
Support farmers in making decisions about crops by monitoring key indicators related to the plant health, crop growth, yield and quality of the fruits.
-
Automation and digitalisation of harvest, monitoring and spraying activities, thus minimising the problem of the dependence on seasonal workers to perform manual operations in agriculture.
-
Collection and sharing of data related to the collected products in order to optimise logistics, transformation and distribution activities
Users and their needs
Three different customer segments have been identified:
-
Individual agricultural companies
-
Consortia of agricultural companies
-
Agriculture supply chain
The main needs are detailed below:
-
Need to improve quality management and reduce production costs and workers’ accidents risks.
-
Need to reduce the handling of fruits during harvesting that might compromise the fruits quality and safety
-
Need to effectively share data along the supply chain.
-
Need to reduce dependency from seasonal workforce (decline in labour in agricultural sector).
-
Increase the data and information exchange among companies within the consortium / association.
-
Need to improve digitalisation and traceability in agriculture sector (the global food traceability market is expected to register a CAGR of 10.2% by 2028 from a market size of $4.54 Billion in 2020)
-
Anticipate disruptions and mitigate their effects.
-
Support in making decisions about crops by monitoring indicators of plant health, crop growth, yield and quality of the fruits.
-
Need to predict supply and sales and adequately set-up logistics.
-
Clearly assess the quality of the products by considering all the sources of environmental contamination, most of which related to the manual harvesting and processing.
-
Need to rely on a data-driven system to assess companies’ performances and impact.
-
Need to assess traceability in the absence of a stable traceability system.
Service/ system concept
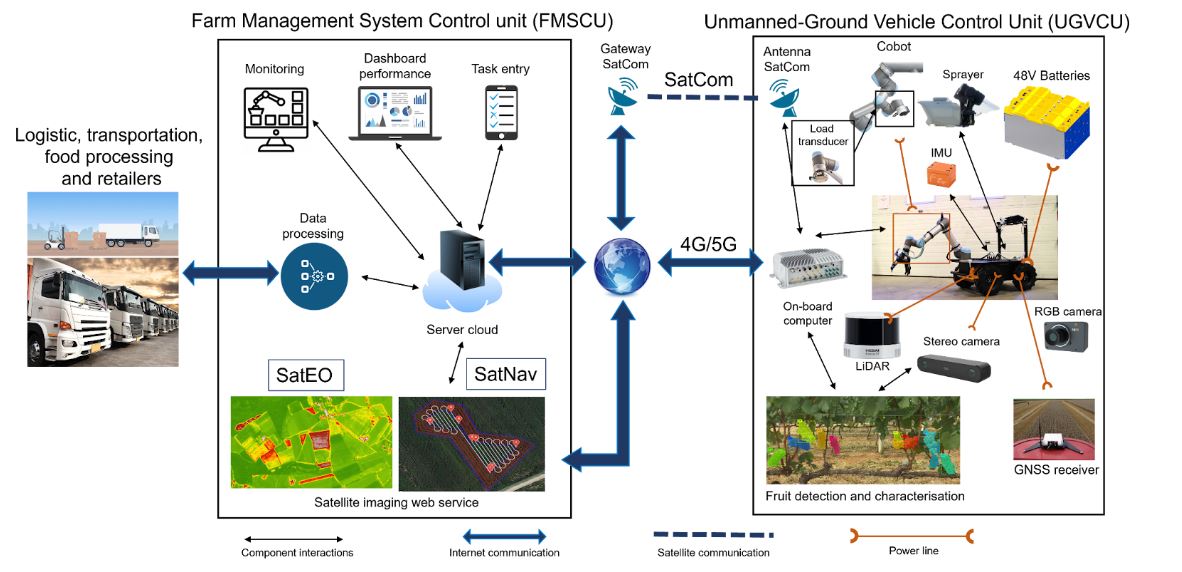
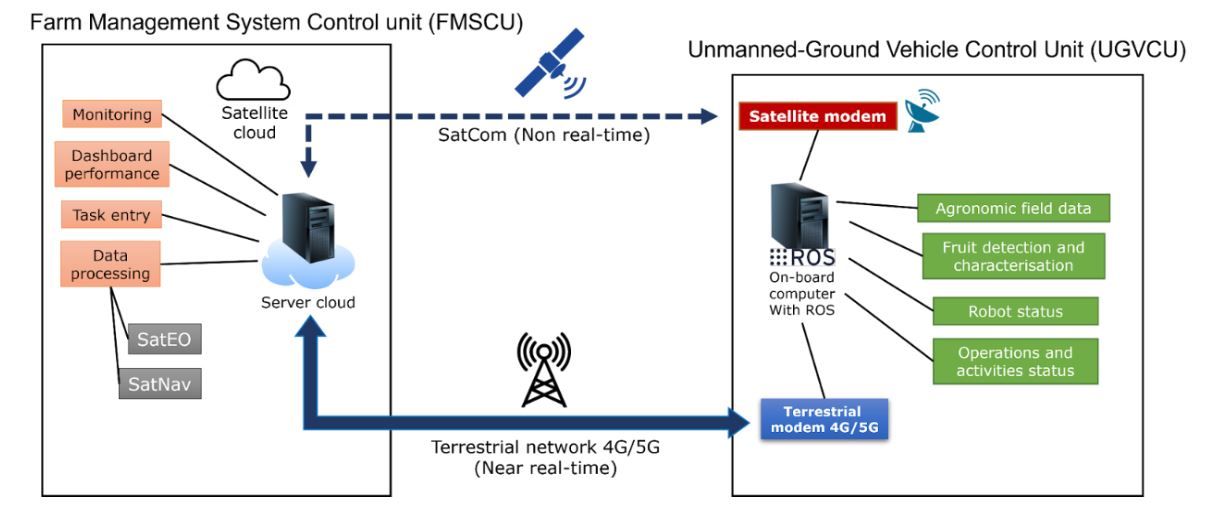
The high-level architecture of RASFarm consists of two different main technological groups, namely:
-
The Farm Management System Control unit (FMSCU), governing the data acquisition, storage and manipulation from the field. The FMSCU offers a dashboard to visualise and interact with processed data and KPIs.
-
The Unmanned-Ground Vehicle Control Unit (UGVCU), working on the field, supported by a number of exteroceptive and interoceptive sensors. The UGVCU is able to manage different activities such as fruit detection, ground evaluation and autonomous navigation.
Space Added Value
The acquisition of multi-spectral satellite images over time constitutes a knowledge base to derive vegetation index maps to infer the status of the crop and schedule the harvesting activities. As an example, SatEO can be retrieved by means of Copernicus Open Access Hub and the PRISMA Portal. Commercial data services or technologies providing higher-resolution and higher-frequency data will be investigated during the study, through trade-off analyses.
To support the autonomous navigation of the system by means of a GNSS receiver mounted on the robotic platform, the team will focus on SatNav. By analysing vegetation index maps retrieved by SatEO, SatNav will be exploited to compute the optimal path to move across the land to maximise the collection rate.
Moreover, in order to ensure communication between the robot control system and the Cloud in case of no coverage of terrestrial communications (4G/5G), we will deepen SatCom solutions.
Current Status
The Final Review Meeting Milestone was successfully held on September 29th 2025.
The team intends to submit an outline proposal to follow on a demonstration project.
Prime Contractor(s)

Subcontractor(s)
