Objectives of the service
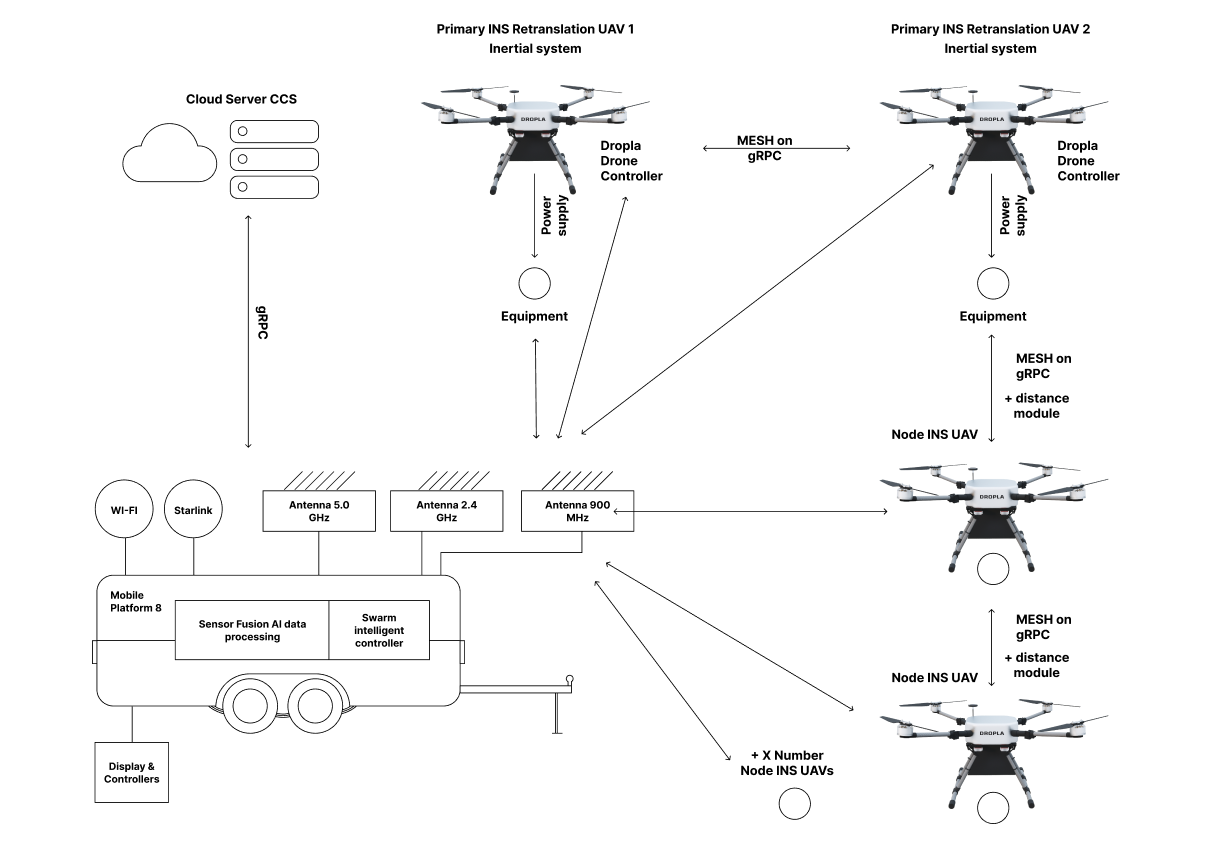
The overall Dropla de-mining system is a mobile unit carrying aerial and ground drones, integrating comms and navigation elements, and the Dropla control station including mission planning and detection software.

In a more schematic picture of the system, we see the different modules of the navigation and communication elements connecting the drone swarm. This is the enabling technology for the complete de-mining service.
The specific navigation modules developed in this project are intended to provide a framework for UAV swarms to operate in environments where GNSS signals might be disrupted or absent and where there is a possibility of active signal spoofing or jamming. This can be applied to land surveying (and derivative applications) in harsh or adverse environments.
Dropla intends to apply such technology in the context of humanitarian demining and land release. Current modii operandi require extensive human intervention and a painstaking amount of time, endangering the lives of both civilian and humanitarian operators and preventing economic development. Dropla aims at solving this problem through a fusion of GNSS-denied technologies and by employing state-of-the-art anti-jamming and spoofing communication technology.
Users and their needs
Given the nature of the main business of Dropla, customers and operators are separated:
-
Customers: Humanitarian, governmental or private organisations involved in post-war land release or border security or land surveying in harsh environments
-
Operators: demining or surveying teams
The main needs of these users and can be summarised as:
-
Ease of operation: the system is designed to be as autonomous as possible, minimising human intervention
-
Speed: while the speed of surveying is determined by the sensors used, Dropla’s system is scalable, allowing for more UAVs to be involved for faster operations
-
Reliability: in the context of demining, the most crucial performance factor is correct detection, particularly avoiding false negatives. Dropla’s mine detection AI is currently working and in continuous development
-
Robustness: Employing redundancy in hardware and in localisation technologies, Dropla aims at a system that can operate robustly in as many environments as possible.
-
Cost-effectiveness: with current demining operations being extremely lengthy and costly, Dropla’s aim to slash surveying time by more than half will allow large savings
The main needs of these users and can be summarised as:
-
Ease of operation: users need a system that can be deployed quickly and without extensive retraining of teams
-
Speed: one of the crucial factors determining the current high costs of clearing contaminated land is the need to manually survey large swaths of land leading to very slow operations.
-
Reliability: in the context of demining, the most crucial performance factor is correct detection, particularly avoiding false negatives.
-
Robustness: reliable equipment capable of operating regardless of adverse conditions allows for less interruptions of operations
-
Cost-effectiveness: with current demining operations being extremely lengthy and costly, any new system must improve the cost/square meter ratio
Service/ system concept
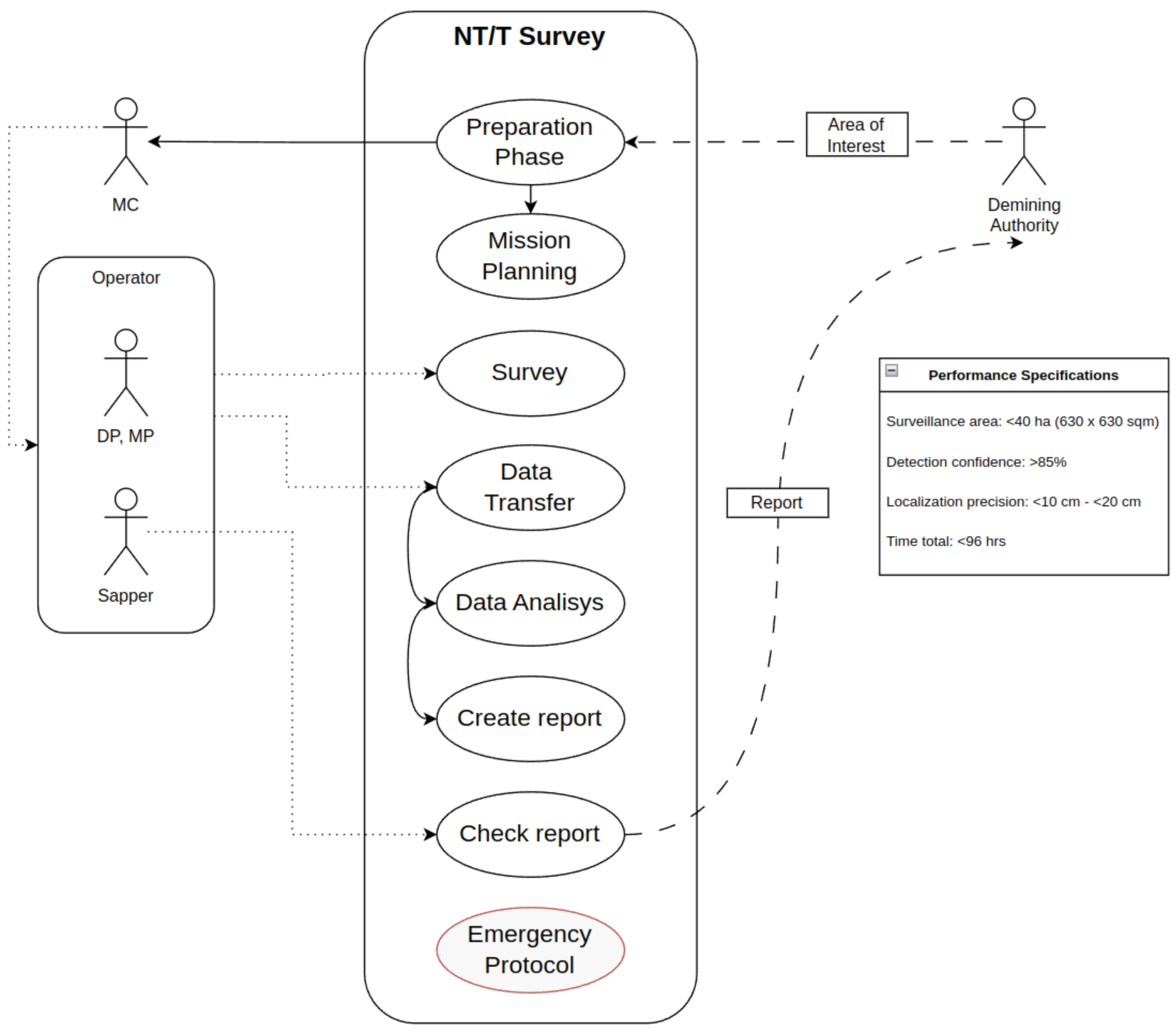
The main capability provided by this system to the user is to allow for continuous operation in a GNSS degraded scenario, with the addition of a high enough level of autonomy to enable the user to detach from direct involvement. The information returned is a survey of the interested area and a list or report of detected explosives for the user to consider.
Space Added Value
The space assets are used in two main areas: communications and navigation.
Communications: demining operations can take place in remote areas often not covered by cellular networks, hence the need for LEO satellite-based communications arises.
Navigation: The involvement of space assets in this project is twofold: firstly, GNSS navigation is still to be part of the system for those situations where signal is available; secondarily, part of the GNSS-denied navigation package includes the use of high-definition LEO satellite imagery.
It is expected that the combination of satellite-aided navigation and other secure navigation techniques will gain the system the capability of operating in harsh environments with weak or unreliable GNSS signals.
Current Status
Field testing of the mine detection system has been conducted extensively, with already first versions of the software reaching significant levels of accuracy. User requirements have been gathered on the field in Ukraine, interfacing with demining teams and current humanitarian organisations involved. A workshop with industry experts was conducted with a focus on navigation algorithms.
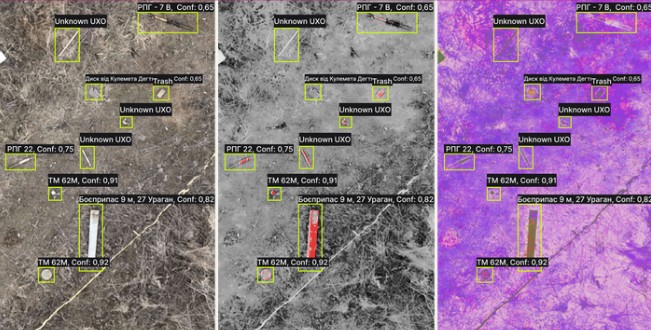
Dropla’s neural networks analyze the aerial imagery and identify ground objects with high accuracy.
The result of the surveillance is a map with precise location and type denotation for land mines in the area of interest. Up to 95% detection rate is achieved across all object categories using RGB, multispectral and thermal sensors. Precise classification divides clutter, trash and known hazardous objects.