
Objectives of the service
The SyriUS demonstration project follows on the SyriUS feasibility study, where Maritime Robotics AS and EOMAP GmbH & Co. KG investigated the feasibility of services that allows a more efficient and accurate solution to survey bathymetry (water depth), seafloor properties, and seafloor habitats. The feasibility study identified that these data currently are often outdated or not available for very shallow water areas. By using a combination of satellite-derived data products and in-situ UMS data, SyriUS will allow users to quickly and cost-effectively obtain these data.
In this demonstration project, EOMAP and Maritime Robotics have developed and demonstrated the services to potential customers or end users. By combining expertise in unmanned maritime systems (UMS) and earth observations (EO), we created a synergetic value-adding chain, which has the technological and economic potential to create a significant improvement on the user's current workflow.
Users and their needs
The SyriUS user communities include hydrographic offices, navies, offshore industries, port authorities, dredging and marine engineering firms, land and marine-based mapping institutes, environmental agencies, policy makers, marine nature management, fisheries, fresh-water reservoir management, and scientists.
The pilot users involved in this demonstration project include hydrographic offices, local authorities for environmental monitoring, institutes involved in environmental monitoring and mapping, companies in the survey sector and dredging sector, and national defence organisations. The pilot users are based in Norway, Sweden, and the Netherlands, which are also the sites for the planned demonstrations within the project.
Their needs are broadly summarized with respect to two data products; bathymetric maps and benthic/habitat maps. Within the SyriUS feasibility study, 28 user needs were identified, related to:
-
spatial needs: high resolution mapping
-
temporal needs: low production times and ability to repeat surveys
-
high accuracy and low uncertainty on data products
-
ability to discriminate vegetation from sediment, and detect different vegetation
-
ability to store data locally, synchronize with servers when possible, and ability for end users to interface to data servers
-
final product: seamless maps
These user needs have been processed into user requirements and system requirements, which are being used in the process of preparing the system for the pilot demonstrations, as well as for the KPIs and system evaluation.
Service/ system concept
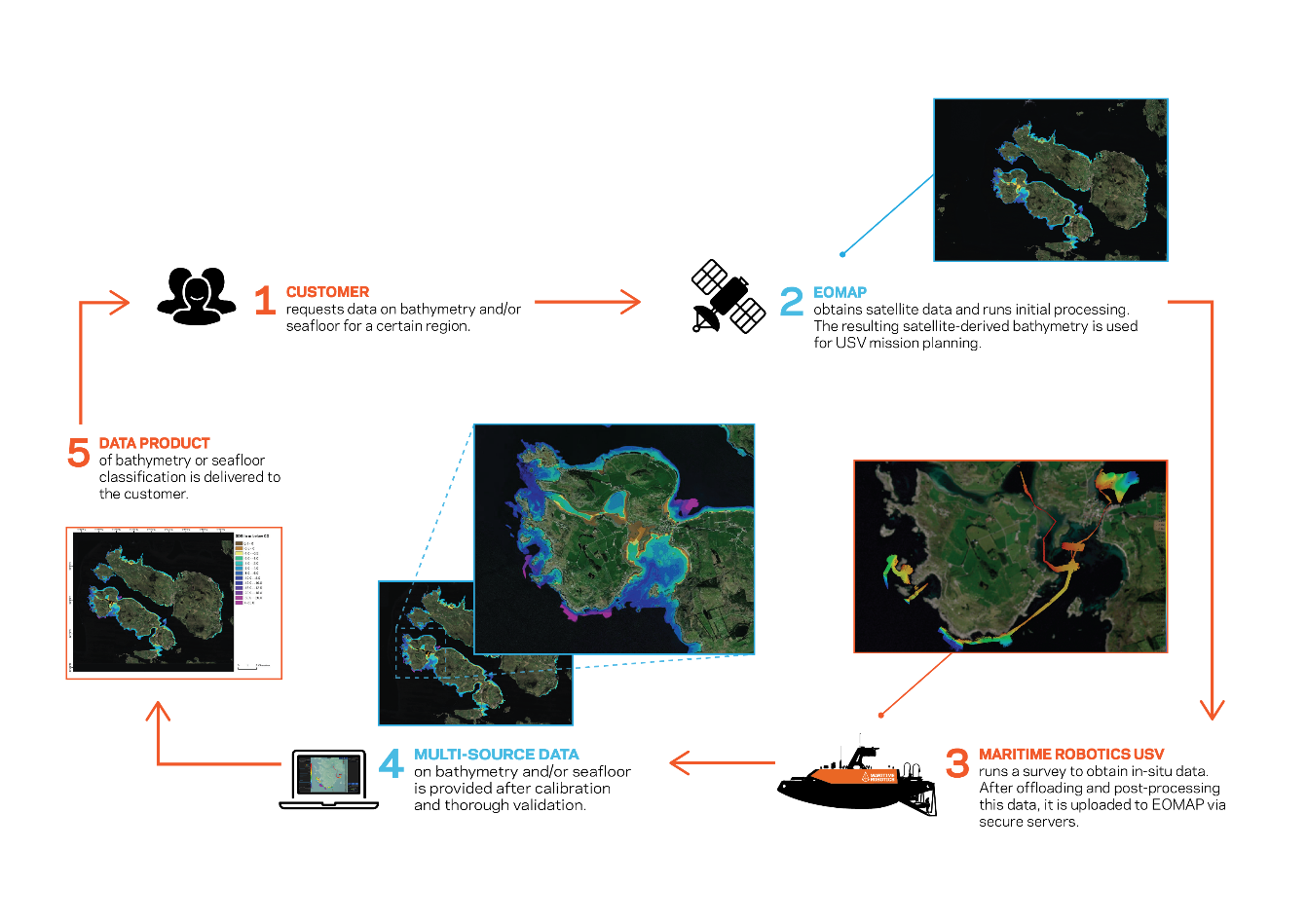
The SyriUS services combine data from UMS with EO derived data products. By doing so, the customer obtains large area coverage from EO observations, with an accuracy closer to what the UMS can provide through in-situ measurements. For the services provided by SyriUS, UMS systems are used that have low draft, can operate in shallow waters, around obstacles, and that carry sensors customizable to the application, for example a multi-beam sonar sensor for bathymetric and benthic mapping. The Sentinel-2 and WorldView satellites provide data at the spatial and temporal resolutions to match the users’ requirements. Data is transferred from the UMS to EOMAP, who calibrates and validates the satellite data and fuses the data into one single data product that is delivered to the user. Once the systems are deployed and services are in place, the end user may obtain data products over larger areas than currently possible, in a timely manner.
Space Added Value
The SyriUS project primarily utilizes earth observation (EO) data, for example from the Sentinel-2 satellites, and satellite navigation for the unmanned maritime systems (UMS). The EO data provides large area coverage faster than can be obtained from UMS. The UMS data can however be used to calibrate and validate the EO data. In doing so, we create data products, such as bathymetric maps, for larger areas and at higher resolution than can otherwise be obtained. Without the space assets, it is not possible to provide a cost- and time-effective solution for mapping large areas for any of the application areas, such as bathymetric mapping for hydrographic offices. Furthermore, combining the two technologies enables the creation of seamless maps that are otherwise hard to obtain.
Current Status
The SyriUS demonstration project (DP) was started in October 2020, following the successful conclusion of the SyriUS feasibility study in December 2019. Within the first 3 months, the consortium has worked on consolidating user needs and requirements with the DP pilot users through user questionnaires. In early 2021, the proposed system and sensors were discussed with the pilot users through user workshops. In August, the consortium successfully completed the Factory Acceptance Test. The Site Acceptance Test (SAT) and the first pilot demonstration took place on September 6th in Southern Norway, with part of the pilot users. The results from the survey were processed and combined in October, and the SAT was successfully concluded. In November, the data was shared to the pilot users and evaluation of results started. In December 2021, a first evaluation meeting took place with pilot users to discuss the data obtained. In January 2022, planning and preparations have started for the 2022 demonstrations. A second evaluation meeting was held with the Norway pilot users in February 2022, who were overall happy with the surveys that were done. In June 2022, demonstration surveys took place in Sweden. The results of these surveys were processed and shared for evaluation. In addition, the final demonstration surveys in the Netherlands were run in August 2022. The data from these surveys was processed and shared and discussed with the pilot users in October 2022. From the evaluation meetings, the project partners identified some points for potential improvement. The different pilot users mentioned the unique value proposition of the SyriUS services as advantages over existing techniques. Overall, the results are promising for a commercialization of the SyriUS services.