
Objectives of the service
Truck-trailer combinations are very attractive for transport and logistic companies as they allow a significant increase in freight tonnage per journey, and thereby reduce the transportation costs and pollution. This project consists of the development and pilot demonstration of a precise navigation system for trucks with trailers that makes reverse parking safe and simple.

The aim of the project is to stimulate more frequent use of long truck-trailer combinations, increasing their safety by enhancing the information given to the driver, permitting a higher amount of freight tonnage per truck and per driver, reducing costs in personnel and fuel, as well as emissions and environmental impact. The service should also permit inexperienced drivers to practice the process of reverse parking, improving their accuracy and timing.
Users and their needs
The actors intended for the use of the system are:
- Truck and trailer manufacturers (their benefit is the installation of the system as a differentiation strategy).
- Truck drivers (end users, their benefit is the enhanced safety and efficiency in the reverse parking process).
- Logistics and transportation companies (their benefit is the reduction of truck transportation costs by the wider use of long-truck trailer combinations and a decreased number of accidents).
The prototype system has been demonstrated with a number of pilot users, including KRONE GmbH, MAN Truck and Bus GmbH, StreetScooter GmbH and AVL List GmbH.
The following key user needs have been identified for drivers of any vehicle with a trailer:
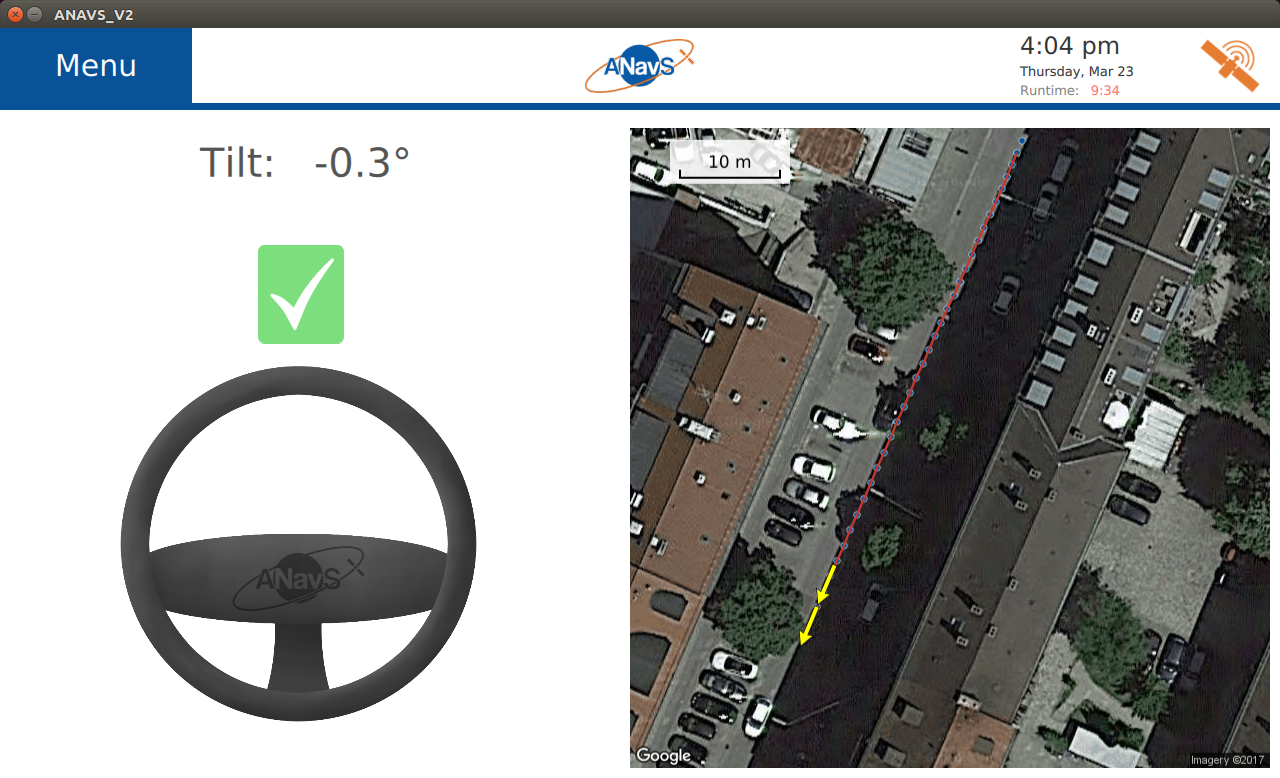
- Precise information on current tilt between truck and trailer
to prevent jack-knifing. - Precise steering wheel guidance information for reverse driving of any vehicle with a trailer.
- Visual awareness of rear area during reverse parking process.
- A solution that can be easily mounted on any trailer.
- Status information showing availability of system.
Service/ system concept
The precise navigation system consists of two ANavS Multi-GNSS/ INS sensor modules for each truck and trailer, the ANavS camera module for the trailer, the ANavS precise positioning module for determining the positions, attitude, tilt and steering wheel guidance information from the raw sensor data, and an App for visualizing the camera video stream and providing steering wheel guidance information.

The precise positioning uses RTK corrections in RTCM standard obtained from a local reference station (e.g. from ANavS) or commercial service provider via internet. The navigation system also uses Earth Observation maps being downloaded, e.g. by a smartphone. The position information is provided as a service for an annual license fee. The license also includes access to new software releases. ANavS also offers a calibration service for the sensors. The calibration can be performed by the end user using calibration software. The licenses can be purchased from ANavS and the software can be downloaded from the ANavS website.
Space Added Value
The added value of using satellite navigation instead of terrestrial based assets is the acquisition of globally available, free, weather independent and precise (with appropriate processing algorithms) real time positioning and attitude information.
The added value of using satellite imagery is to provide a map to the driver. The relationship between the current positions of the truck and trailer and the final parking position can be analysed from a birds-eye view, which is especially beneficial if the parking requires a curved trajectory and/or there is a substantial tilt between the truck and trailer.
Current Status
ANavS has developed in this project a low-cost positioning system for trucks that provides the position with centimetre level accuracy and the heading with 0.1 degree accuracy.
Thereby, the positioning system supports both autonomous driving and advanced driver assistance systems. The system is particularly useful for reverse parking of long truck-trailer combinations as it provides precise steering wheel guidance information.
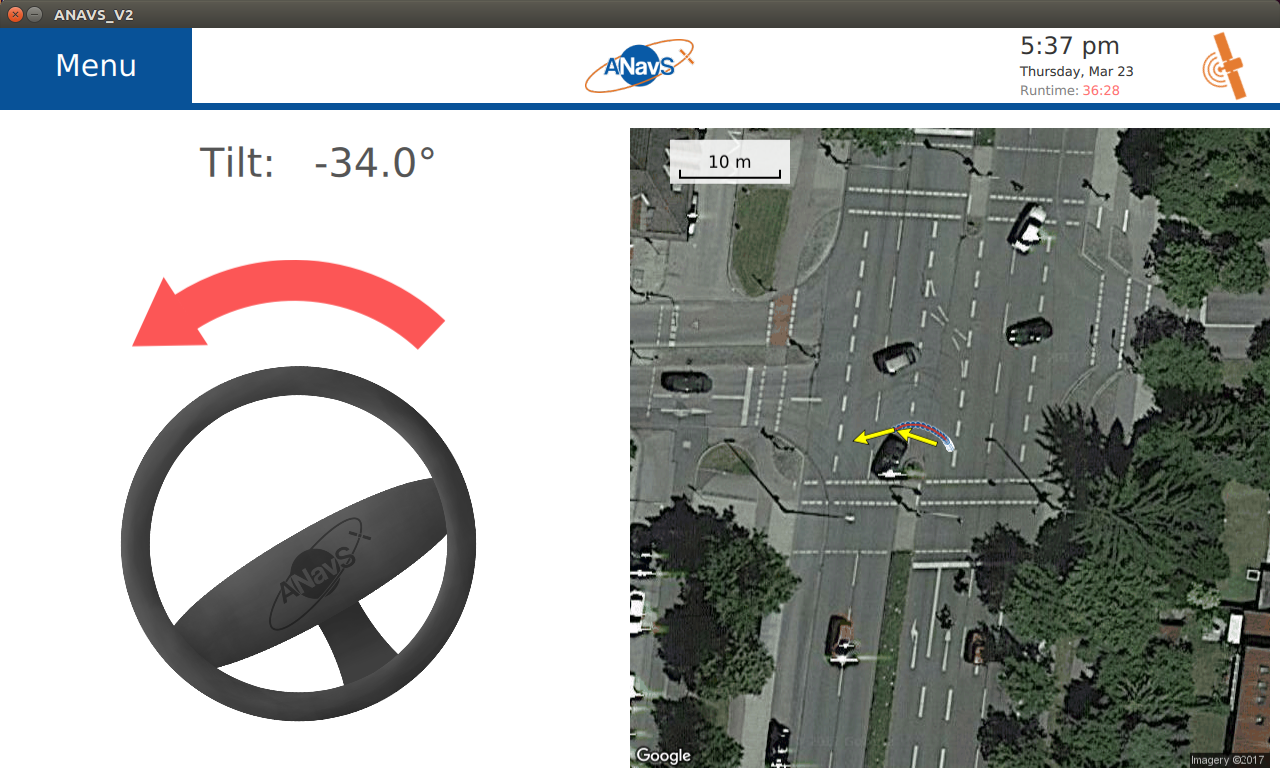
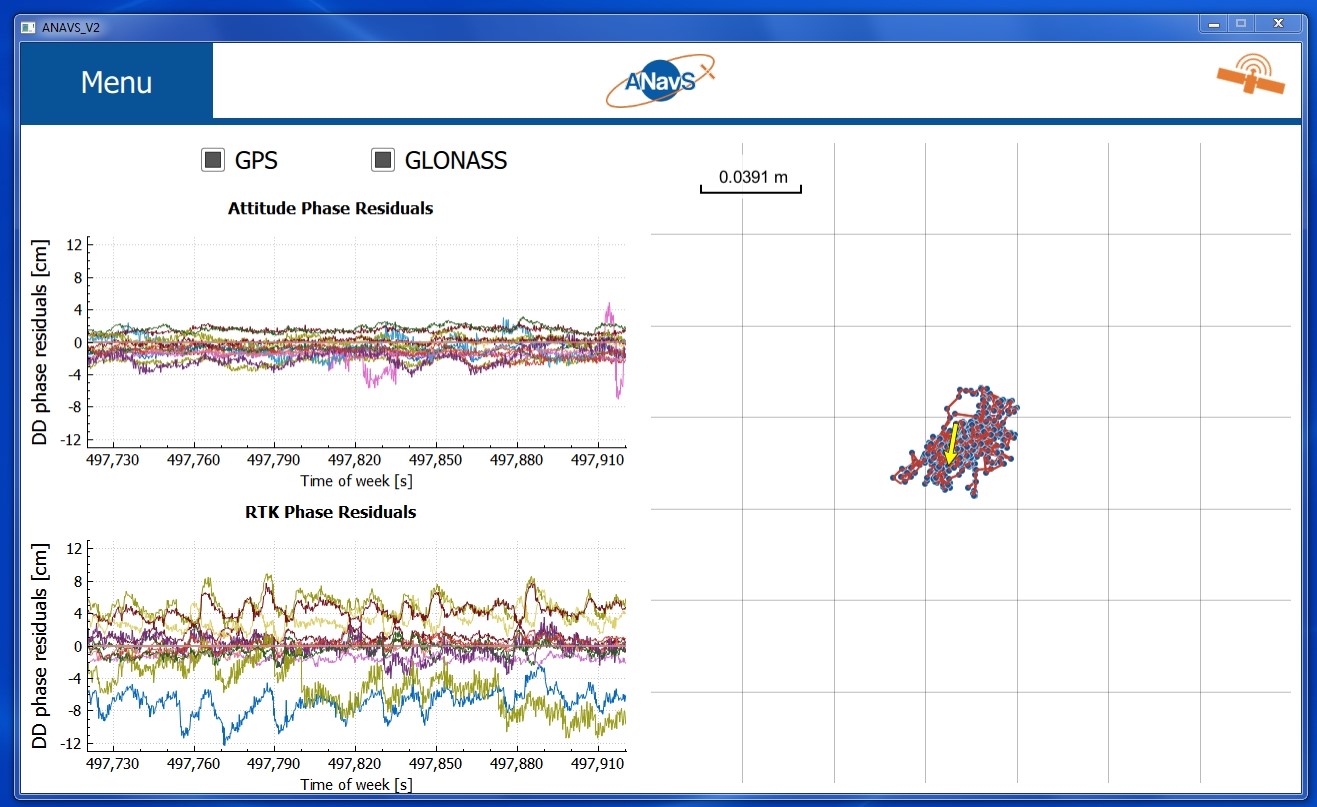
A reliable solution has been enabled by the use of Multi-GNSS (GPS + GLONASS + Galileo) and the tight coupling of GNSS and inertial sensors. The tilt of the trailer is derived from the difference of the headings, and serves as basis for determination of steering wheel guidance information. The system additionally includes an ANavS camera module that provides a rear-view camera image to the truck driver.
The precise positioning system of ANavS is market-ready, and the first prototype systems have already been sold to truck and car manufacturers.