
Objectives of the service
Land Mines and Improvised Explosive Devices (IEDs) present an enduring global threat. The significant cost of removing mines and IEDs, both in financial terms and human casualties, is typically borne by Government and Non-Governmental Organisations (NGOs), security and stabilisation forces and commercial organisations. Humanitarian and post-conflict demining uses traditional well-proven techniques and procedures with hand-written reports and progress drawings.
The MIDAS programme uses satellite technologies as an enabler for new services to make demining operations safer, more efficient, cheaper, auditable and more autonomous. In the second phase of the programme, prototypes are made robust and new applications developed.
The aim of MIDAS is to develop an integrated suite of mine and IED clearance support tools. The key systems are: a mine clearance management system with real-time tracking of all assets; virtual
Users and their needs


Demining organisations have shown interest in stand-off automated search methods, using small drones or robots. Such systems can perform safe and rapid search area reduction.
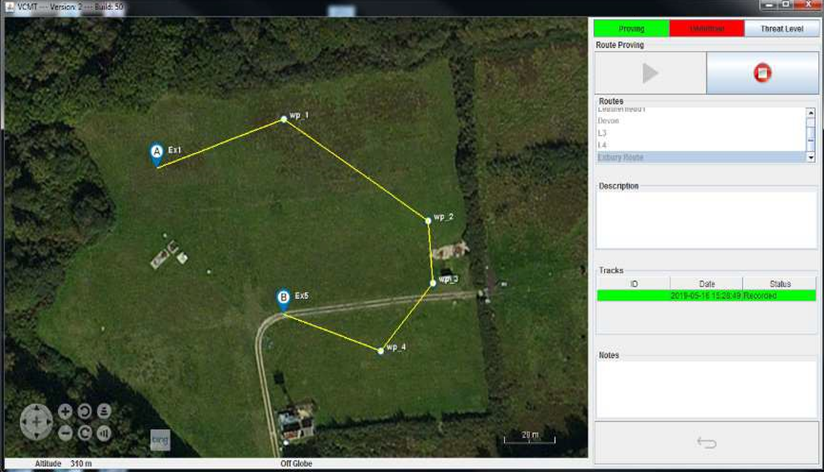
They also want systems to prove and maintain vehicle routes, enabling safe transport during post conflict operations.
Hence, the key user needs derived for MIDAS are:
- Accurate tracking of the search area coverage and marking of threat locations to support planning and traceability of demining operations
- Virtual training without needing physically buried targets, for use indoors or outdoors, providing consistent, repeatable quantified assessment of trainee competence
- Greater levels of autonomy and stand-off detection
- Route proving and safe transport using proven routes
- Systems that are lightweight, affordable, transportable and simple to use
- Assurance that demining equipment is setup and used correctly, effectively and safely
- Minimum deviation from existing Standard Operating Practices (SOPs)
The MIDAS systems may be used throughout the world in any area affected by mines and IEDs. The users may come from any country.
Service/ system concept
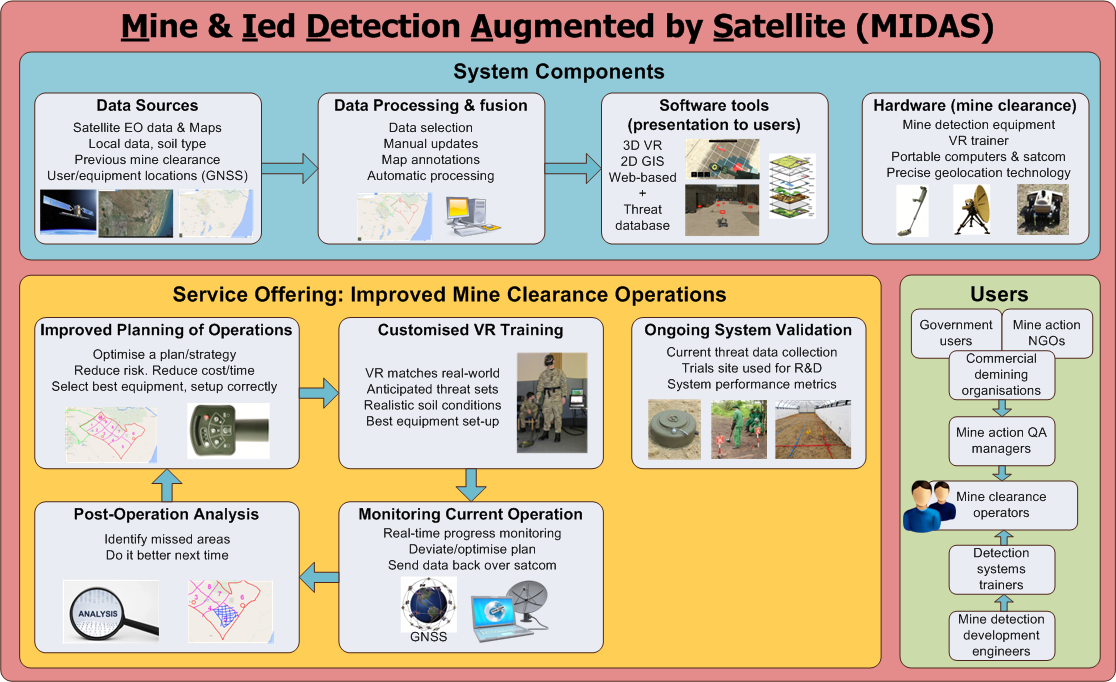

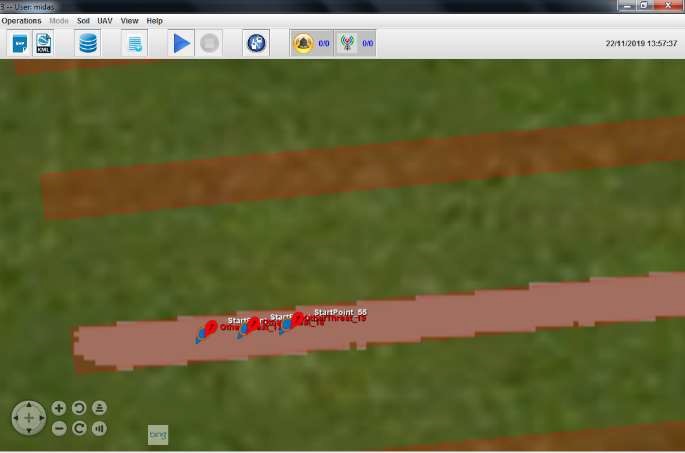
- The CMT incorporates Geographic Information System (GIS) based software tools to capture, store, analyse, manage and present geographic data for mine clearance operations, including Earth Observation (EO) imagery and the real-time clearance data.
- The CMT provides a comprehensive tool for the management of all the data relevant to demining operations, including personnel details, emergency contacts, assets and on-site stock. It logs individual operator performance metrics and asset utilisation and can automatically generate Daily Task, Daily Operational and Completion Reports.
- The PC could also be connected to a satellite communications terminal to send data back to a remote headquarters, where data can be displayed within a web-based application.
- The CMS can also be used for analysis of a completed clearance operation to improve operational efficiency as well as a tool to help plan operations.
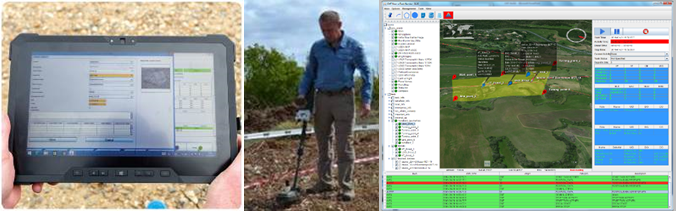
The Handheld Detection System allows the user to more easily setup the detector using data from soil probes and EO databases. It also allows for better detection capability using new displays and detection data augmented with location information.

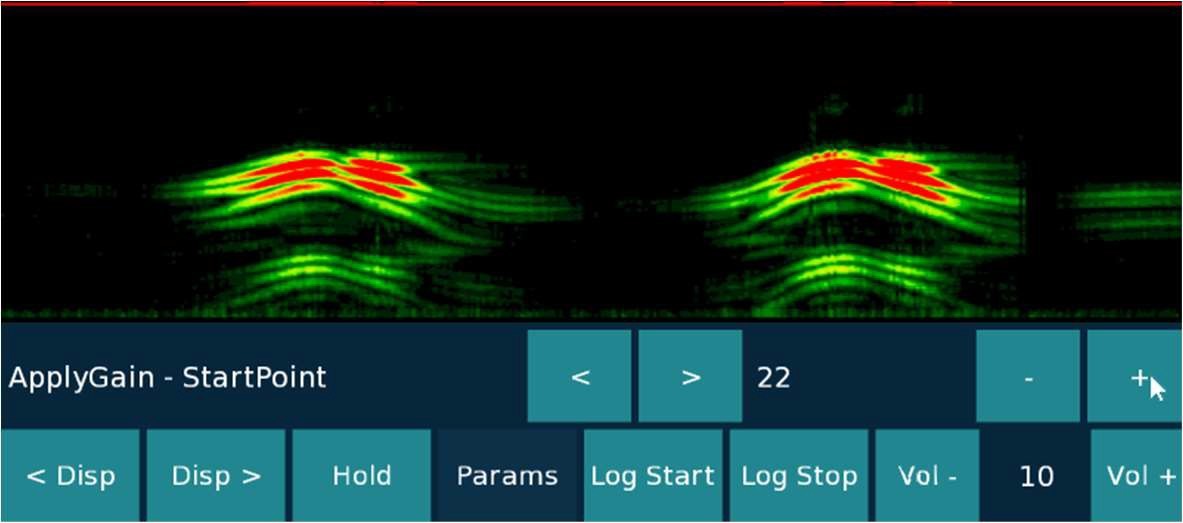
The MIDAS Training Systems teach trainees how to use detectors, by searching for virtual threats in a synthetic virtual environment using a real detector which is tracked in 3D, and modelled in real- time in the virtual environment. The trainer can virtually position threats within the training area, removing the requirement for dedicated training lanes with buried targets, which are expensive to configure and setup. The system autonomously generates performance metrics on each trainee covering sweep, coverage and detection. It is available as an indoor version with VR headset or an outdoor version, the latter using precision GNSS and sensors to track the detector. It is particularly useful for GPR detector training, which are more complex to use.


The MIDAS Route Proving System uses a variant of the CMS designed for use within vehicles operating in post conflict scenarios. It creates a map of an area that can be used to show safe routes for vehicle travel. It may be used on a route proving vehicle such as one fitted with Cobham’s Amulet GPR detection array.

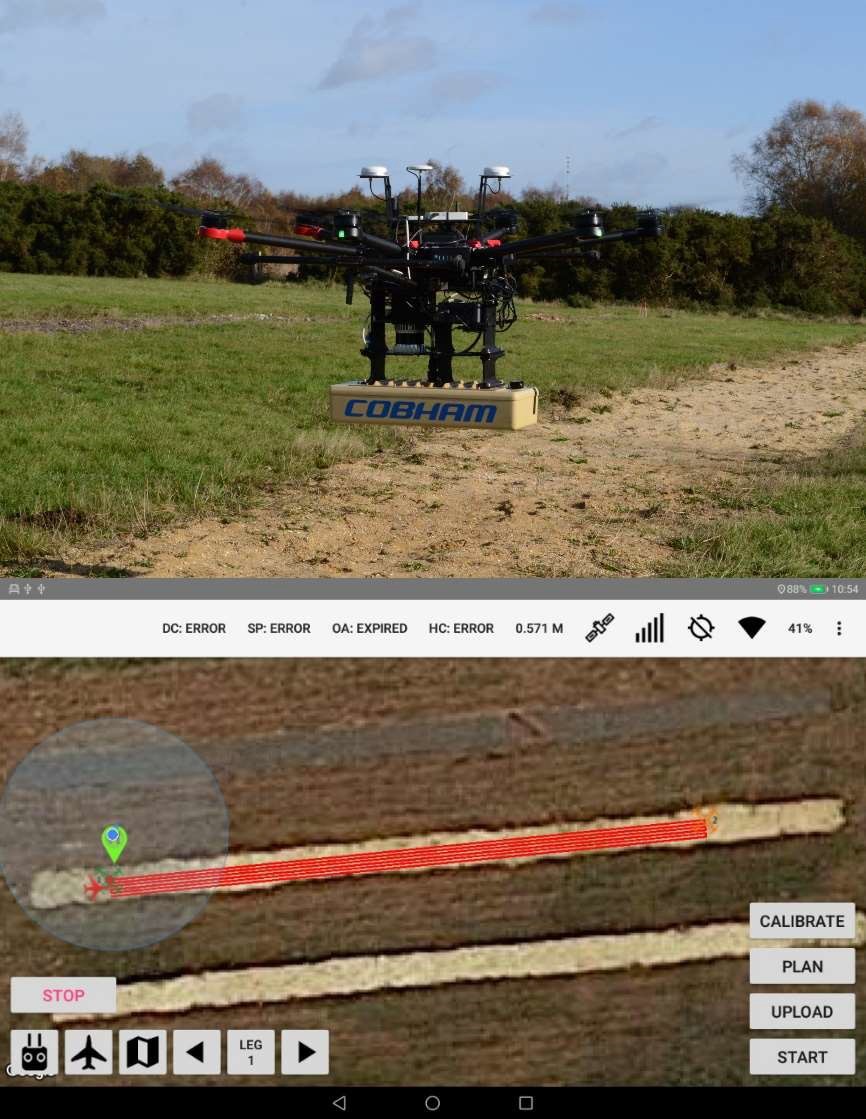
The MIDAS Autonomous Search Systems enable automated stand-off detection using an Unmanned Aerial System (UAS) or Unmanned Ground Vehicle (UGV). The unmanned system is tasked with an area to search from the CMT and then autonomously follows a defined search path avoiding obstacles.

Space Added Value
The two principal assets that the system will utilise are Global Navigation Sensor Systems (GNSS) data and Earth Observation (EO) imagery data from satellites and, where appropriate, further augmented by imagery from High-Altitude Platforms (HAPs).
GNSS satellites are used to track detectors to display their real-time location on maps with satellite imagery and support location-based features, to control drones autonomously and in a training system.
Detection systems (handheld and vehicle mounted) are configured with precision multi-constellation GNSS receivers and multi-band antennas and augmented with Real-Time Kinematic (RTK) correction to track their positions with centimetre-level accuracy.
Satellite communications could be used in conjunction with the MIDAS system when used in remote locations to relay project critical progress reports in addition to accessing EO data and maps.
Current Status
The project has been successfully completed, after carrying out the final review in May 2020.