

Objectives of the service
Use of 3D models or digital twins to visualise assets, for inspection, maintenance and documentation purposes, has been widely adopted by many industries above water and often the underwater the state of assets is unknown to the owner. As an underwater pioneer, UVision provides a 3D scanner for modelling of underwater assets. The following advanced features, realised through the ESA KickStart project, help users achieve their goal of accurately capturing digital twins of their assets, and doing so effectively, wherever they are.
The enhanced underwater positioning capability delivers models of unprecedented accuracy that are positioned in the global coordinate system. Satellite based positioning also improves robustness of the scan as well as adding the convenience of being able to scan large assets in stages, with the models of each stage being correctly oriented to each other.
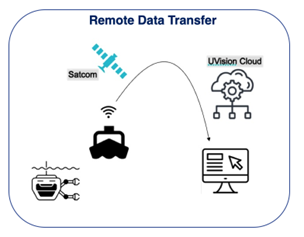
The satellite based remote data transfer capability allows users to upload scan data to UVision’s cloud services from anywhere, also beyond terrestrial mobile coverage. So even when in remote offshore or land based locations, models can be generated and quality checked whilst on site.
Users and their needs
UVision’s business users fall within three segments: infrastructure owners, consulting engineers and marine contractors, across various sectors including: civil infrastructure, energy, maritime, planetary health, national security and defence.
The users want to be able create accurate 3D representations of their underwater assets for inspection, maintenance and documentation purposes.
These users need a high degree of model accuracy so they can trust the information presented and detect small changes that happen within the model by comparing with earlier models of the same asset. The users need to import the model into existing Geographic Information Systems and combine with existing data models. Therefore, having a model that is accurately referenced in the global coordinate system is important.
Some users need to be able to postprocess and check the quality of their scans whilst on site in remote areas as it can be costly to return if there are problems with the data quality.
The companies that have already shown interest in these capabilities are in the following countries: Denmark, UK, France, Germany, Estonia, and UAE. UVision has active queries from around the world.
Service/ system concept
The following two concepts are investigated as part of this KickStart project.
Underwater global positioning
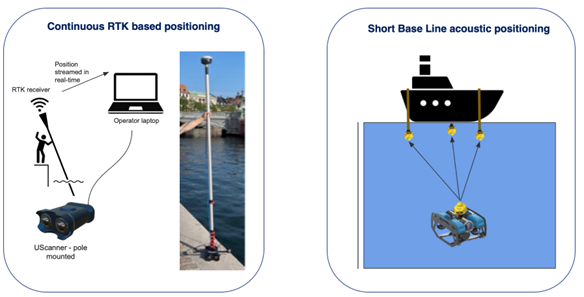
This KickStart project compares two methods of improving 3D model accuracy by using different underwater positioning techniques.
Continuous RTK (Real Time Kinematics) based positioning
The position of the RTK receiver is accurate to within 1cm. This is used to estimate the position of the scanner which is shared in real-time to the UScanner which uses the position data in the creation of the 3D models.
Short Base Line acoustic positioning
In this case an acoustic triangulation system is used to estimate the position of the 3D scanner underwater on the ROV (Remotely Operated Vehicle - an underwater drone)
The positioning data is used within the post-processing photogrammetry process. The models resulting from each method are compared both in terms of 3D model accuracy and positioning accuracy.
Remote Data Transfer
This capability provides access to UVision cloud service from most locations on the planet by using Satellite communication technology such as Starlink. This means users can upload and process their scan data whilst still on site.
Space Added Value
The utilised space assets are Satellite Navigation and Satellite Communication services. The positioning capability offered by the Satellite Navigation services delivers a strong improvement in terms of model accuracy and the accurate placement of the model reflecting the placement of the real-world asset. This capability will significantly improve the service for all customers using the UVision scanning product.
The remote data transfer capability will be very important for certain customers operating in remote areas that need to use cloud services to verify the quality of the 3D models.
Current Status
The new capabilities developed under this project are being requested by users, so UVision will start selling them as part of its service and product. There are refinements and further development needed which will also depend on the specific customer requirements. For example, does UVision need to provide an RTK receiver or underwater positioning system, or would the customer prefer to use their own existing systems, if they have them? We believe we need to be prepared for both options, but also need more learnings from customer interactions which will drive how we finally shape the new service capabilities as products.